北九州⾼専発ロボットスタートアップ、キックロボティクス株式会社(本社:福岡県北九州市⼩倉北区、代表取締役:滝本隆)は、通い箱(プラスチックコンテナ)をハンドリングするロボットハンド(柔軟指)を開発、パレタイズ・デパレタイズロボットでの活用を想定しています。
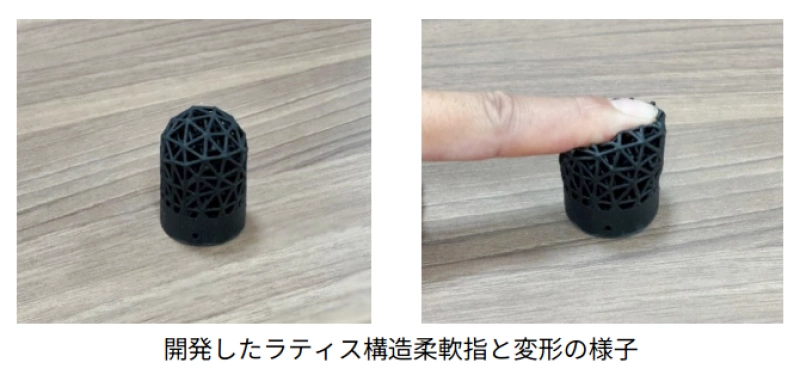
この柔軟指は、ラティス構造と呼ばれる立体の格子構造で構成されており、3D プリンタでしか造形できない複雑形状をしています。
この構造によって耐久性をそのままに「やわらかさ」を実現し、複雑な箱の形状にならい安定した把持が可能となります。
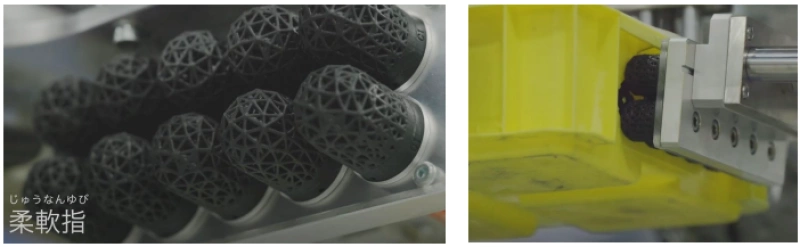
通い箱の荷積み・荷下ろしを自動化するロボットでの活用に向けて、トヨタ自動車株式会社モノづくりエンジニアリング部での評価をスタートしています。
これまで、様々な規格・形状の通い箱が混載されている状況下では、「箱を安定して把持できない」ことや「箱が割れてしまう」ことがあり自動化が困難でした。
これを解決するために、ラティス構造の柔軟指を使っていただいています。
- 会社名:KiQ Robotics 株式会社(キックロボティクス)
- 本社所在地:福岡県北九州市小倉北区浅野 1-3-1
- 代表取締役:滝本 隆
- 設立:2019 年 4 月 25 日
「世界一働きやすい生産現場をつくる」のビジョンのもと、産業⽤ロボットの⺠主化を⽬指しています。つらい単純作業から人々を解放し、創造的な仕事に取り組む人々の幸せに貢献します。QB キャピタル、ANRI 等大手 VC から 1 億 7 千万円の出資を受けています。
ラティス構造柔軟指の詳細について
ラティス構造柔軟指は、「高い形状ならい性」と「高い耐久性」を実現できる点が特徴です。
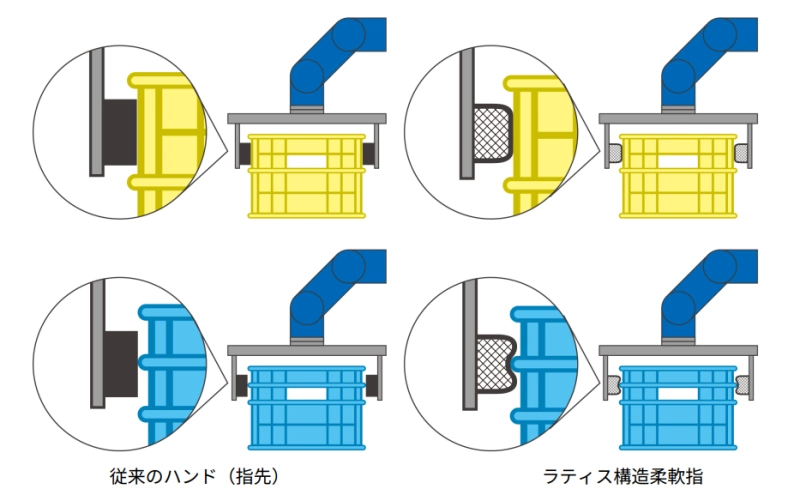
高い形状ならい性通い箱は規格によってその形状は様々です。とくにリブと呼ばれる突起があるため、これまではこれらを避けて把持する必要がありました。
突起部分を把持してしまうと、接触部分が「点」となってしまい、
- 力がかかりすぎて箱が割れてしまう
- しっかりつかめず滑り落ちてしまう
ことがあります。
ラティス構造柔軟指は、構造によって変形を適切に調整できるので、
- 把持方向に対して大きく変形することで箱のリブ等の形状にならい
- 重力方向に対してはあまり変形せず垂れによる脱落を防ぐ
ことが可能です。
ラティス構造で、材料の異方性(物理的特性が方向によって異なること)を実現しています。
結果として、接触部分が「面」となることから通い箱を安定して把持することが可能となります。
高い耐久性
突起等のある対象物を把持するロボットハンド素材として、ゲルやスポンジなどのやわらかい材料を使うことが考えられます。
しかしながらこれらの素材は、一般的に耐久性があまりなく、すぐにボロボロになってしまいます。
ラティス構造柔軟指は、強度のある素材を使って、構造によって変形を適切に調整し「やわらかさ」を実現しているので、高い耐久性能が期待できます。
実際に、ラティス構造柔軟指を繰り返し変形させるテストを行い、約 400 万回の繰り返し変形後にも把持性能が変わらないことが分かっています。

お問い合わせ先「KiQ Robotics 株式会社」
- TEL:093-482-4622
- e-mail:info@kiq-robotics.co.jp
- URL:https://kiq-robotics.co.jp


コメント